
本文由具有专利文件和技术图纸分析经验的日本专利代理师撰写并审核。本网站不仅将日本专利图纸视为法律资料,也将其作为体现贴近儿童视角与情感需求的技术创意表达进行介绍。本文将解读一项与可实现可爱爬行动作及辅助行走的人偶玩具相关的专利,重点分析其如何将温和的动作控制与适合儿童的设计转化为结构清晰的技术方案。
引言:能“学爬又学走”的玩偶
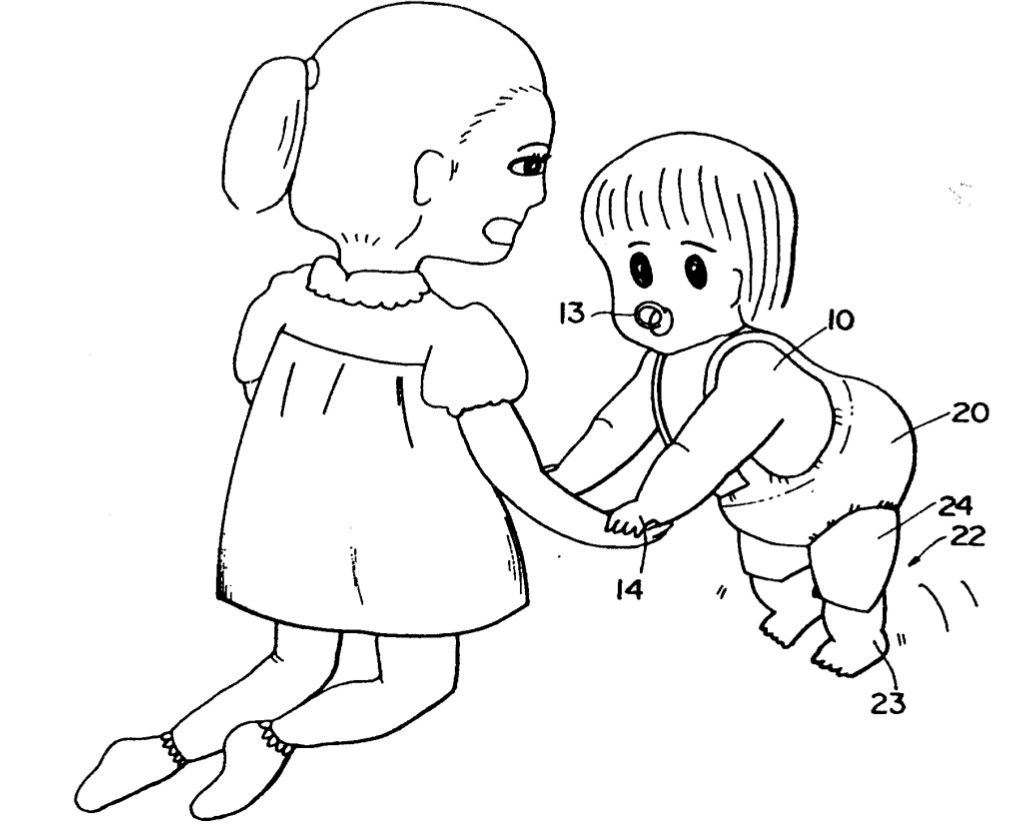
模仿婴儿动作的玩偶一直深受儿童喜爱。本专利展示的玩偶能够 可爱地爬行并进行辅助行走,通过机械关节与支撑结构提供丰富的互动体验。
专利图展示的机械结构
图中可见可推动爬行的手臂关节;能轻微弯曲的躯干用于模拟自然动作;用于辅助行走的腿部结构;提供稳定性的引导支架;以及驱动节奏动作的内部齿轮系统。整体结构旨在安全地再现婴儿般的动作。
爬行与辅助行走机制如何运作
手臂的推动力与躯干弯曲使玩偶实现平稳爬行;辅助行走依赖支撑架维持平衡;驱动机构带来左右节奏性的腿部动作;必要时加入稳定器以控制倾斜与速度;整体动作柔和、自然、富有童趣。
这种设计的优势
促进角色扮演与照护想象;帮助儿童理解婴儿成长阶段;动作柔和不吓人;适用于教育类或亲子互动玩具;更便于设计主题套装或互动场景。
工程与安全考量
手握部位需采用柔软材料;躯干需具备抗冲击性;行走速度需缓慢稳定;关节需耐用不易损坏;辅助行走装置需确保不倾倒。安全性与可爱度并重。
专利律师的想法
动作让玩偶更具生命力。
通过让玩偶学爬、学走,这项发明把“成长瞬间”带入游戏之中,帮助孩子与玩偶建立温柔的情感联结。
本技术的应用领域:映射用户情绪成长周期的“具身发育型微生物伴侣”系统
原始发明要点
- 玩具人偶能够可爱地爬行,并在牵手时实现辅助行走。
- 模拟婴儿的发育动作模式。
- 人偶的动作为用户引导做出反馈。
- 用于培养共情、照护意识与温和互动。
抽象化后的概念
- 将“发育阶段”具象化为小型实体。
- 用移动方式表达关系与情绪。
- 通过用户的引导改变实体的“成长状态”。
- 以身体互动构建成熟度模型。
转用方向
- 根据用户的情绪成长、心理状态变化而逐渐“发育”的微型伴侣实体,让其行为模式成为用户内在成熟曲线的投影。
具体化呈现
手掌大小的微型生物从柔和的爬行动作开始“生命”。随着用户变得平静、体贴或自信——系统通过语音、动作、生体信号检测——小生物会学会步行、奔跑、漂浮甚至舞动。它的发育阶段完全映射用户的情绪成长。当用户心境低落时,它会重新回到爬行阶段,提示用户照顾自己。玩具不再是玩具,而是“情绪成长的具身化身”。
↓相关图↓


