
引言:为什么要让机器人学习“漫才”?
漫才是一种依靠节奏、对话反差与夸张肢体动作的日本双人喜剧形式。本专利提出的机器人能够通过动态手势、身体倾斜与头部动作来执行漫才表演,使幽默以可编程的方式呈现,将文化艺术与机器人技术结合。
专利图展示的结构特点
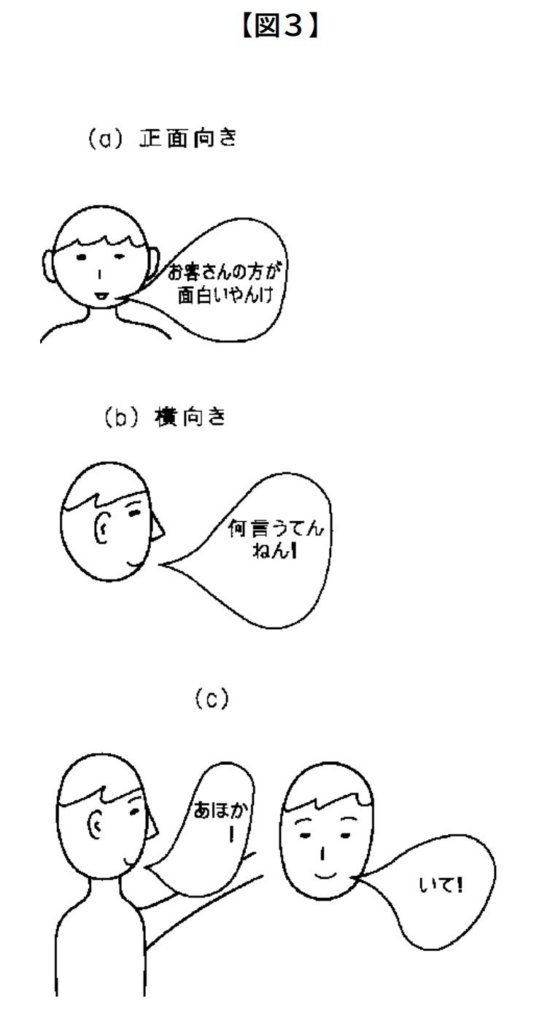
图纸展示了具有人形结构的机器人,其手臂能够进行大幅度动作,躯干可前倾或后仰,头部动作可随着台词同步;内部设有根据剧本触发动作的控制模块,底部结构稳固以避免表演时的倾倒。
漫才动作机制如何运作
机器人内部的剧本引擎负责处理漫才节奏;动作控制器根据“吐槽”“铺垫”等节点执行对应动作;预设的表情肢体语言如惊讶、无奈、强调动作,可与语音同步;整套系统确保手势、台词、节奏协调一致。
这种设计的优势
适用于主题乐园、表演舞台或展览互动;可作为日语学习或文化教学工具;展示机器人同步动作控制技术;也能作为“角色型机器人”的开发平台,探索机器人个性表现。
工程与技术考量
需确保执行器能承受高频动作;手势精确度要与台词同步;避免大幅手臂动作导致重心失衡;保持低噪音以提升观看体验;不同动作需在安全范围内运行。
专利律师的想法
幽默依赖节奏,而节奏是一种精密控制。
这项发明让机器人也能“抖包袱”“做反应”,让科技与舞台表演产生意想不到的交汇。
本技术的应用方向:表现型机器人平台
目的
让机器人能够以与台词同步的方式执行漫才式手势表演。
系统构成
- 剧本节奏引擎
- 手势动作控制器
- 人形关节结构
- 头部同步模块
- 稳固底座
运行流程
加载剧本 → 根据提示执行动作 → 手臂与头部同步 → 执行情绪反应动作 → 保持平衡。
总结
该发明让机器人不仅能“工作”,还能“表演”,并以幽默表达技术的可能性。
免责声明:本内容系人工智能根据专利图纸生成的重新诠释。仅供教育和文化用途,不构成法律建议。
↓相关图↓


